Mailbag #26
A collection of very useful and completely useless items coming in from 中國.
I really need to start running some of these late night decisions past a disinterested observer! 😬
A collection of very useful and completely useless items coming in from 中國.
I really need to start running some of these late night decisions past a disinterested observer! 😬
For a few years now I've been using the 5050 "three-in-one" LEDs to provide nice gentle yellow night time light. I have previously posted a blog and video about these LEDs.

Recently I have been thinking a little too much about the next improvement to this longtime and ongoing project. It occurred to me that this combined LED is missing two advantages of a real flame.
1. The LEDs are available in either RGB (not very lifelike) or a single colour (such as yellow in my case)
2. The LEDs are crowded around a fairly tight radius (around 1.7mm) which makes it almost "pin point"
Also I thought it would be good to have an integrated minimum resistance protection component as well as a space for a potentiometer to regulate light levels.

The resultant and rather hastily designed board was sent out to PCBWay and in particular a big shout out to Elaine who very generously came onboard to manufacture and ship the PCBs.
They arrived really quickly because Elaine sent them DHL which was hugely expensive!
Before racing along to the candle project, I wanted to test the LED PCB in a more familiar environment (or so I thought). I wanted to build on an old project which used a single SMD LED.
The simple extension was to code for three lights and a temperature scale to give greater accuracy when looking out the window.
/* LM35 RGB solar light temperature monitor OneCircuit: https://www.youtube.com/c/onecircuit-as/videos https://onecircuit.blogspot.com/ pin PB3 used as VCC for LM35 pin A2 used as analog input pins PB0-2 used as LED outputs Device: ATtiny13A ____________ / | | RESET VCC | VCC LM35-switch | PB3 PB2 | RLED A2 | PB4 PB1 | BLED | GND PB0 | GLED |____________| Fri 23 Dec 2022 10:58:44 AEDT */ #include <avr/sleep.h> #define sensorPin A2 #define LM35VCC PB3 #define RLED 0b00000100 #define BLED 0b00000010 #define GLED 0b00000001 void setup() { DDRB = 0b00001111; PORTB = 0b00000000; // start up LED dancing! blinkme(RLED); blinkme(RLED); blinkme(BLED); blinkme(BLED); blinkme(GLED); blinkme(GLED); } ISR(WDT_vect) { // wake up! } void snooze(uint8_t cycles, uint8_t howlong) { // sleep preparation WDTCR = howlong; ADCSRA &= ~(1 << ADEN); ACSR |= (1 << ACD); cli(); BODCR = (1 << BODSE) | (1 << BODS); BODCR = (1 << BODS); sei(); set_sleep_mode(SLEEP_MODE_PWR_DOWN); sleep_enable(); // sleep now for (cycles; cycles > 0; cycles--) { sleep_mode(); } sleep_disable(); // waking up ADCSRA |= (1 << ADEN); // turn on ADC ACSR = (0 << ACD); // Turn on Analog comparator. delay(10); // take a breath } // apparently needed before analogRead in this case void adc_setup (void) { ADMUX = (2 << MUX0); ADMUX |= (0 << ADLAR); ADCSRA |= (1 << ADPS1) | (1 << ADPS0) | (1 << ADEN); } // blinking routine void blinkme(uint8_t whichcolour) { PORTB = whichcolour; // turn on GLED snooze(1, 0b01000011); // 1x64 ms sleep PORTB = 0b00000000; // black out snooze(1, 0b01000100); // 1x250 ms sleep } void loop() { snooze(1, 0b01100000); // 1x4 second delay adc_setup(); digitalWrite(LM35VCC, HIGH); delay(100); // settle LM35 long int temperature = analogRead(sensorPin); temperature = ((temperature * 449L) / 1023L); digitalWrite(LM35VCC, LOW); // analyse result if (temperature > 23) { blinkme(RLED); blinkme(RLED); blinkme(RLED); } else if (temperature > 19) { blinkme(RLED); blinkme(RLED); } else if (temperature > 17) { blinkme(RLED); blinkme(GLED); } else if (temperature > 15) { blinkme(RLED); blinkme(BLED); } else if (temperature > 13) { blinkme(GLED); blinkme(RLED); } else if (temperature > 11 ) { blinkme(GLED); blinkme(GLED); } else if (temperature > 9) { blinkme(GLED); blinkme(BLED); } else if (temperature > 7) { blinkme(BLED); blinkme(RLED); } else if (temperature > 5) { blinkme(BLED); blinkme(GLED); } else if (temperature > 3) { blinkme(BLED); blinkme(BLED); } else { blinkme(BLED); blinkme(BLED); blinkme(BLED); } }
Sadly there was a huge rabbit hole (more like an underground labyrinth) which developed over some fake LM35 ICs, a problematic LM335 sidetrack involving floating point calculation approximations, and a heap of useful but frustrating problems which makes this a very long, but hopefully interesting video.
Again, thank you to PCBWay who were incredibly generous in their provision of the PCBs featured, the subsequent freight and of course a heap of lovely s.w.a.g.
Enjoy the (long) video..
I have previously confessed that I did not manage organise my Christmas lights in time this year. Following Mr PileOfStuff's example I should have grabbed an ESPixelStick, downloaded software, hooked it all up to my lights and network, and then kicked back with some eggnog (whatever that is) and enjoyed the festive season.
But no - my extreme laziness and disorganisation sees me instead just grabbing an ESP8266 (ESP-01 version) from the buckets, loading up the old (but stable) V3.2 ESPixelStick software, and then hooking up the WS2811 lights and adding power. The result? Fizzing and spluttering nonsense!
After a fair bit of head scratching and reading I came to the realisation that the 3.3V data signal coming out of the ESP8266 was not talking to the 5V tolerant WS2811 chip. The voltage mismatch had resulted in illogical confusion. Thus began a bit of a deep dive into voltage level shifting.
Thus, following on from last week's blog and video about voltage level shifting for data lines, I did some more experimentation with various chips, modules and circuits and eventually settled on a very common solution as shown in the following diagram. Low voltage (LV) is 3.3V and High Voltage (HV) is 5V in my case. I will only need one way data transmission across this level shifter, but it does in fact work both ways.

There are a lot of mosfet transistors that would admirably perform the switching, I settled on the BS170 as per the diagram - I have a few and it seemed most likely to easily meet the 800(k)Hz data switching speed required of the circuit. In fact it can switch well into the MHz range.
The commercial version is almost always based on a BSS138 mosfet, and as well I tried the 2N7000 with success.

I also upgraded the ESP-01 from 1Mb to 4Mb as has been done before, solely to try and squeeze the new version of the ESPixelStick software onto the device.
I successfully tested the hardware and software with the level shifter doing the translation, and also tried different software (WLED). Despite my initial bumblings, it seems that Christmas will be well served by festive lights after all!
Shamed by PileOfStuff into finally upgrading my Christmas lights, I ran into an all too familiar problem.
Kent sensibly acquired and continues to use the ESPixelStick as his hardware/software for his lights, but due to my laziness and disorganisation I would not be able to get one into the country in time for the current festive season.
Also - due to a late night buying spree, I happen to have a lot of ESP8266 (ESP-01s versions).
Furthermore, I have in the past desoldered the paltry 1Mb flash and upgraded the memory to 4Mb so a LED loving webserver should be possible (more on this in a later post).
Amazingly - I managed to get all of the hardware and software sorted and then...major disappointment! The data output from the ESP8266 (3.3V) is insufficient for the WS2811 chip (5V) to be happy.
A few fizzly lights later and a bit of looking about on the interwebs and I was down the "level shift" rabbithole.
This blog post and video is about the first part of this journey. I started with a CMOS chip (the CD4081) with the intention of using it to level up the signal voltage to 5V.


It didn't work as expected! A really big rabbithole later I found out that CMOS chips usually need a 3.5V minimum for "High" to be registered, and we have 3.3V coming out of the ESP8266 - whoops!

Therefore, halfway through the attempt I swapped out the CD4081 CMOS IC for a TTL chip, the SN74HCT14N which is a hex inverter.
TTL chips (at least this one) describe a minimum voltage for registering a "HIGH" as 2.7V, well under the 3.3V that is arriving at the GPIO.
A hex inverter! Hex as in "evil curse" because I've had to use these inverters so many times now - they just keep haunting me.


Wiring the whole thing up worked a treat - and the level shifting was done. I was able to start with a pulse from a 3.3V source and output a 5V signal.

Part Two of this blog and video will be using this new found level shifting knowledge to connect a 3.3V data line to the 5V LEDs and trying out a few options. Stay tuned!
This week there is much to be found in the mailbox, including some locally sourced Raspberry Pi Picos - watch out soon for some WiFi enabled Picos currently in the air flying down to Tasmania.
In the meantime, enjoy the video.
I have made a few variations of the ATTiny13 based "candle", including dedicated PCBs and assembler code driving two PWM channels to produce a candley flicker.
Lately I have branched out to a dedicated Padauk PFS154 PCB with a combined Stable Joule Thief circuit.
There are so many projects, videos, blogs etc over the years that I have made a little map to help me track what is going on!

I'm expecting a delivery from PCBWay for a small dedicated board (in orange on the diagram) for the LEDs of the project (more on this later), but the current work (in yellow on the diagram) is in the power delivery for the project and also with a PFS154 based PCB.
The green node on the diagram is pie in the sky ASM code for the Padauk chip. It is my strong desire to get into this aspect of the project, as I really enjoyed the assembly version of the ATTiny13 candle.
The current code is in "C" and looks like this:
/* Candle with Three PWM Pseudo-random flickering to simulate a candle. Output is via 3xPWM channels, variables can be changed to alter the simulation */ #include <stdint.h> #include <stdlib.h> #include "../device.h" #include "../easy-pdk/calibrate.h" #include "../auto_sysclock.h" #include "../delay.h" #include <stdbool.h> #define LED4_BIT 4 #define LED0_BIT 0 #define LED3_BIT 3 uint16_t myrand = 2901; // happy birthday // global variables randomised later for flickering, using the // "waveslow" and "wavefast" arrays uint8_t slowcounter = 0; uint8_t medcounter = 0; uint8_t fastcounter = 0; uint8_t slowstart = 0; uint8_t slowend = 0; uint8_t medstart = 0; uint8_t medend = 0; uint8_t faststart = 0; uint8_t fastend = 0; uint8_t faster = 0; uint8_t waveslow[] = {20, 30, 70, 100}; uint8_t wavemed[] = {25, 40, 100, 120}; uint8_t wavefast[] = {20, 30, 120, 140}; // booleans to keep track of "fading up" or "fading down" // in each of the slow and fast cycles bool fastup = true; bool slowup = true; bool medup = true; void mydelay(uint8_t counter) { for (uint8_t thiscount = 0; thiscount <= counter; thiscount++) { _delay_us(1); } } uint16_t gimmerand(uint16_t small, uint16_t big) { myrand ^= (myrand << 13); myrand ^= (myrand >> 9); myrand ^= (myrand << 7); if (abs(myrand) % 13 == 0) { myrand = myrand - 23; } if (abs(myrand) % 17 == 0) { myrand = myrand + 11; } return abs(myrand) % 23 * (big - small) / 23 + small; } void getnewslow() { slowstart = gimmerand(waveslow[0], waveslow[1]); slowend = gimmerand(waveslow[2], waveslow[3]); } void getnewmed() { medstart = gimmerand(wavemed[0], wavemed[1]); medend = gimmerand(wavemed[2], wavemed[3]); } // initialise a new fast cycle including the new speed of cycle void getnewfast() { faststart = gimmerand(wavefast[0], wavefast[1]); fastend = gimmerand(wavefast[2], wavefast[3]); faster = gimmerand(1, 3); } // Main program void main() { // Initialize hardware // Set LED as output (all pins are input by default) PAC |= (1 << LED4_BIT) | (1 << LED0_BIT) | (1 << LED3_BIT); // see datasheet PWMG1DTL = 0x00; PWMG1DTH = 0x00; PWMG1CUBL = 0xff; PWMG1CUBH = 0xff; PWMG1C = 0b10100111; PWMG1S = 0b00000000; PWMG0DTL = 0x00; PWMG0DTH = 0x00; PWMG0CUBL = 0xff; PWMG0CUBH = 0xff; PWMG0C = 0b10100111; PWMG0S = 0b00000000; PWMG2DTL = 0x00; PWMG2DTH = 0x00; PWMG2CUBL = 0xff; PWMG2CUBH = 0xff; PWMG2C = 0b10100111; PWMG2S = 0b00000000; getnewfast(); getnewslow(); getnewmed(); slowcounter = slowstart; fastcounter = faststart; medcounter = medstart; // Main processing loop while (1) { // ramp up slow if (slowup) { slowcounter++; if (slowcounter > slowend) { // ramp finished so switch boolean slowup = !slowup; } } else { // ramp down slow slowcounter--; if (slowcounter < slowstart) { // ramp finished so switch boolean slowup = !slowup; getnewslow(); } } // ramp up med if (medup) { medcounter++; if (medcounter > medend) { // ramp finished so switch boolean medup = !medup; } } else { // ramp down med medcounter--; if (medcounter < medstart) { // ramp finished so switch boolean medup = !medup; getnewmed(); } } // ramp up fast if (fastup) { fastcounter = fastcounter + faster; if (fastcounter > fastend) { // ramp finished so switch boolean fastup = !fastup; } } else { // ramp down fast fastcounter = fastcounter - faster; if (fastcounter < faststart) { // ramp finished so switch boolean fastup = !fastup; getnewfast(); } } // delay + a re-purposed random for ramp speeds mydelay(3 + faster); PWMG1DTL = slowcounter & 255; PWMG1DTH = slowcounter; PWMG0DTL = fastcounter & 255; PWMG0DTH = fastcounter; PWMG2DTL = medcounter & 255; PWMG2DTH = medcounter; } } // Startup code - Setup/calibrate system clock unsigned char _sdcc_external_startup(void) { // Initialize the system clock (CLKMD register) with the IHRC, ILRC, or EOSC clock source and correct divider. // The AUTO_INIT_SYSCLOCK() macro uses F_CPU (defined in the Makefile) to choose the IHRC or ILRC clock source and divider. // Alternatively, replace this with the more specific PDK_SET_SYSCLOCK(...) macro from pdk/sysclock.h // AUTO_INIT_SYSCLOCK(); PDK_SET_SYSCLOCK(SYSCLOCK_ILRC_DIV4); // Insert placeholder code to tell EasyPdkProg to calibrate the IHRC or ILRC internal oscillator. // The AUTO_CALIBRATE_SYSCLOCK(...) macro uses F_CPU (defined in the Makefile) to choose the IHRC or ILRC oscillator. // Alternatively, replace this with the more specific EASY_PDK_CALIBRATE_IHRC(...) or EASY_PDK_CALIBRATE_ILRC(...) macro from easy-pdk/calibrate.h // AUTO_CALIBRATE_SYSCLOCK(TARGET_VDD_MV); EASY_PDK_CALIBRATE_ILRC(18000,3300); return 0; // Return 0 to inform SDCC to continue with normal initialization. }
The super capacitor node is almost dead at the moment as I cannot get the project to go beyond 4-5 hours of light, even using an 80F Cap.
I'll probably go back to cheap and nasty NiCd or NiMH AAA batteries. There are 250F Lithium Supercaps about, and so I maintain a "flicker" (pun intended) of interest in this branch of the project.
This blog and video, however, is about the PFS154 dedicated Stable Joule Thief (SJT) board.

It's not specifically for the candle project, but the board uses the well tested SJT circuitry to provide enough juice for a PFS154 to do it's thing. The big balancing act has been between lower power delivery, slower clock speed and realistic candley action.
Every time I made a code change while working on this (and there were so many!) I rushed to a dark linen cupboard with the breadboard to test the resultant flickering.
My long time collaborator began to think that I may have lost the plot, but when they found themselves in the cupboard as well (for a second opinion) then things became even more tense!
In the end I found the right balance for both of us, and so the first of the PFS154 candles rolls off the assembly line. May there be many more - they are truely lovely!
Us old grumpies are ruing the day we signed up for multiple media streaming services - the money disappears regularly from the account, but the platforms we pay for are increasingly bereft of good content, and rumour has it that adverts are arriving soon.
It's not unusual for a close collaborator of mine and myself to pine for simpler times of listening to a well known album from a long forgotten CD, or perhaps watching a much loved movie from a DVD. The trouble is - the only working CD/DVD player we have is hooked up to a computer.
There is a "bluray" machine but my collaborator has a visceral reaction to it's tardiness, labelling it "slowray".
I think we might have a few older machines somewhere in the garage, but really we are looking for a cheap, easy (and perhaps more modern) way to access some old content, and thus "streamcast" ourselves adrift of the content provider wars (for the time being).
Enter the Orange Pi PC Plus!

Here we have a cheap and very capable "headless" server that just might be able to deliver over the WiFi network (Australian Invention™) the videos and music of yesteryear to a couple of rusted on fogies intent on sinking back into simpler times. An updated version of Timothy Leary's "Turn on, tune in, drop out".
The "slow" part of the process to date has been digitising the media. To be honest the music part had already mostly been done, and we're now in the process of acquiring and digitising various DVD movies (including all the old home movies which were on, wait for it, Video8 Tape!).

Converter of choice is HandBrake - simple to use, reliable, quick, cross-platform and it seems to be in constant development.
I haven't ripped any CDs for awhile so I'm not so conversant with the landscape in this regard - but a quick search would be in order if you have needs for such music transfer.
Hot tip: the local recycling centre has thousands of movies at around $1 each.
Spoiler Alert! We've seen the movies and listened to the music before.
Second Spoiler Alert! The system works really well and we're much happier (and a bit richer).
This week I'm opening some packages, the most interesting of which is a couple of recommendations from twitter of good cheap components from LCSC.
Enjoy!
I seemed to be cursed to "randomly" pick up hex inverters from the buckets and try to make unique circuits from them.
So far I have made an uninspiring but surprisingly popular blinker (CD4069), and a cool train crossing indicator (CD40106).
Fortunately I found another great circuit this time - using the CD4049.
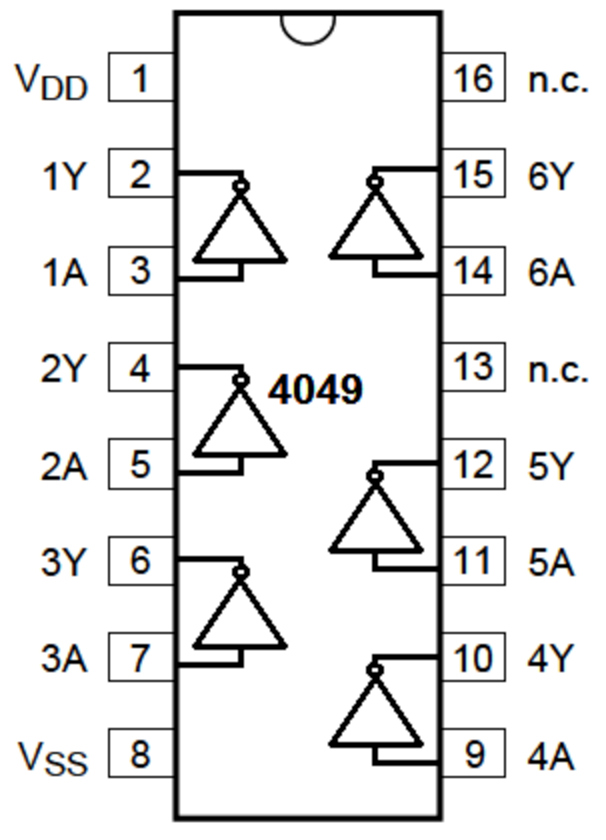
The premise of the circuit is a "cupboard light" that uses minimal power until it is activated by a momentary switch, and then it shines only for a pre-determined amount of time.

It's a pretty cool idea and it worked really well, although the timing for the "on" part of the ciruit seemed a bit "off".

I didn't explore the discrepancy between calculated time and measured time - perhaps NOT tying down the other inputs caused the issue. Not that it was really a problem for me, I would just experimentally change the values until I had the time I needed.
I think a potentiometer for R1 might be "vary" useful to change these times as well.
What a wonderful grab bag of "wire critters" coming into Tassie this week.
Every packet opening a joy, and thank you to my Chinese suppliers for the mini rush of dopamine!
I have to say that the little semi-circular photo-transistor is my favourite in this bunch.
Indulging my whimsical penchant for quirky tech I recently took delivery of the enigmatic CH552G. It turns out to have a lot of stuff locked up in its monolithic shell! From the datasheet comes the following:
Core: Enhanced E8051 core compatible with MCS51 command set, 79% of its commands are single-byte single-cycle commands, and the average command speed is 8 ~ 15 times faster than that of the standard MCS51, with special XRAM data fast copy command, and double DPTR pointers.
ROM: Non-volatile memory ROM that can be programmed for many times, with the capacity of 16KB, can albe used for program storage. Or it can be divided into a 14KB program storage area and a 2KB BootLoader/ISP program area.
DataFlash: 128-byte non-volatile data memory that can be erased for multiple times and supports rewrite data in unit of byte.
RAM: 256-byte internal iRAM, which can be used for fast temporary storage of data and stack. 1KB on-chip xRAM, which can be used for temporary storage of large amount of data and direct memory access (DMA).
USB: Built-in USB controller and USB transceiver, support USB-Device mode, support USB type-C master-slave detection, support USB 2.0 full-speed (12Mbps) and low-speed (1.5Mbps) traffic.
Support data packet of up to 64 bytes, built-in FIFO, and support DMA.
Timer: 3 sets of timers (T0/T1/T2), which are standard MCS51 timers.
Capture: Timer T2 is extended to support 2-channel signal capture.
PWM: 2 PWM outputs, PWM1 and PWM2, are 2-channel 8-bit PWM output.
UART: 2 sets of UARTs. Both support higher communication baud rate. UART0 is a standard MCS51 serial port.
SPI: The SPI controller has built-in FIFO, and the clock frequency can reach half of the system dominant frequency Fsys. It supports simplex multiplex of serial data input and output, and Master/Slave mode.
ADC: 4-channel 8-bit A/D converter. It supports voltage comparison.
Touch-key: 6-channel capacitance detection. It supports up to 15 touch keys, and supports independent timing interrupt.
GPIO: Up to 17 GPIO pins (including XI/XO and RST as well as USB signal pins).
Interrupt: It supports 14 sets of interrupt signal sources, including 6 sets of interrupts compatible with the standard MCS51 (INT0, T0, INT1, T1, UART0, T2), and 8 sets of extended interrupts (SPI0, TKEY, USB, ADC, UART1, PWMX, GPIO, WDOG). And GPIO interrupt can be selected from 7 pins.
Watch-Dog: 8-bit presettable watchdog timer WDOG, support timing interrupt.
Reset: 4 kinds of reset signal sources. Built-in power on reset, software reset, watchdog overflow reset and optional pin external input reset.
Clock: Built-in 24MHz clock source, which can support external crystals by multiplexing GPIO pins.
Power: Built-in 5V to 3.3V low dropout voltage regulator. It supports 5V or 3.3V or even 2.8V supply voltage. Support low-power sleep mode and external wake-up of USB, UART0, UART1, SPI0 and part of GPIOs.
Built-in unique ID.
The highlighted dot points above are particular features that I would like to explore with this little chip. The first of these (touch channels) is the subject of this blog and video.
In the diagram below any pins labelled TIN are touch channel pins.

I wanted to blink lights (of course!) when a touch was detected, but it becomes difficult if a light is blinking (and thus employing a pause or delay in processing) to detect a touch.
If we had, for instance, a blink of 1 second on, 1 second off the microcontroller is effectively "frozen" waiting for the delay to finish. A touch detection could be missed while the chip waits for this delay to be over.
This is a fairly normal programming dilemma for single core microcontrollers. As there is no multi-threading etc to split the program, I used a standard technique to simulate multi-tasking.
Effectively we let the clock keep running and the loop stays in motion. There are no delays used in the program to "pause" the instructions. Instead, we use timing markers and we do comparisons each time the loop is executed.
If a previously defined timer length is tripped, then something happens. For instance, if we are "waiting" one second for an LED to turn off, then a timer comparison between when the LED went on with the current time (an "if" statement with a subtraction) would trip that event.
There are plenty of good explanations for this method already online, and you could also step through the code provided below (and watch the video) to see how it is applied in this case.
/* * Touch PIN code for CH552G * OneCircuit Sat 24 Sep 2022 16:52:26 AEST */ #include <TouchKey.h> // timing variables: how long since last touch, since // last fast touch and since fast slow touch long touchtime = 0; long fast = 0; long slow = 0; long currenttime = 0; int turnofftime = 15000; // no touch time, turn off LEDs // were any wires touched? boolean notouch = false; // timing and status for LEDs int slowtime = 500; // milliseconds int fasttime = 100; boolean slowstatus = false; // lit or not? boolean faststatus = false; boolean usingfast = false; // flashing fast or slow? boolean usingslow = false; // the led pins #define LEDslow 30 #define LEDfast 11 void setup() { // output and write low pinMode(LEDslow, OUTPUT); pinMode(LEDfast, OUTPUT); digitalWrite(LEDfast, LOW); digitalWrite(LEDslow, LOW); // setup Touch key for TIN2 and TIN3 delay(50); TouchKey_begin( (1 << 2) | (1 << 3) ); // Enable TIN2(P1.4), TIN3(P1.5) delay(50); } // function that checks if wire has been touched // then returns that wire uint8_t checktouch() { uint8_t anytouch = 0; uint8_t stoptouch = 1; TouchKey_Process(); anytouch = TouchKey_Get(); // if you hold the wire, nothing happens until // you let go, even dousing the lights if (anytouch != 0) { digitalWrite(LEDfast, LOW); digitalWrite(LEDslow, LOW); while (stoptouch != 0) { TouchKey_Process(); stoptouch = TouchKey_Get(); } } return anytouch; } void loop() { // check if wires are touched and check // current time notouch = checktouch(); currenttime = millis(); // we've been touched, so turn on the appropriate LED if (notouch != 0) { touchtime = millis(); // start the timing count // it was a fast touch if ((notouch) & (1 << 2)) { usingfast = true; usingslow = false; digitalWrite(LEDfast, HIGH); digitalWrite(LEDslow, LOW); fast = millis(); slowstatus = false; faststatus = true; notouch == 0; } // it was a slow touch if ((notouch) & (1 << 3)) { usingslow = true; usingfast = false; digitalWrite(LEDslow, HIGH); digitalWrite(LEDfast, LOW); slow = millis(); faststatus = false; slowstatus = true; notouch = 0; } } // no touch so just check blinking time etc // are we past the turnoff time? if (currenttime - touchtime < turnofftime) { // fast led timing on and off if ((usingfast) && (currenttime - fast > fasttime)) { if (faststatus) { digitalWrite(LEDfast, LOW); fast = millis(); faststatus = false; } else { digitalWrite(LEDfast, HIGH); fast = millis(); faststatus = true; } } // slow led timing on and off if ((usingslow) && (currenttime - slow > slowtime)) { if (slowstatus) { digitalWrite(LEDslow, LOW); slow = millis(); slowstatus = false; } else { digitalWrite(LEDslow, HIGH); slow = millis(); slowstatus = true; } } } // past turn off time, so turn off everything else { digitalWrite(LEDfast, LOW); digitalWrite(LEDslow, LOW); slowstatus = false; faststatus = false; } }
In the end the program worked out really well and due to the "fake multitasking" the pins were very responsive to touch.
I would be keen to implement interrupts as well and streamline the code a little bit.
I really enjoyed working with this little wonder, and soon I'll take a look at the "Built in unique ID" which seems interesting as well!
"I'm always chasing rainbows!" - nice lyrics from Thomas Joseph McCarthy and in my case it could be better phrased as "I'm always chasing low clock speeds and energy requirements!"
It's a little fruitless and frustrating at times but I'm a big fan of Thomas Edison who said a couple of things that resonate in these strange pursuits:
1. "Opportunity is missed by most people because it is dressed in overalls and looks like work.", and
2. "I have not failed 10,000 times. I have successfully found 10,000 ways that will not work."
So in this project the plan was to take a successful light design and change out the NiMH battery for a super-capacitor. The reason is that NiMH batteries have a much smaller cycle lifetime compared to super capacitors.
As well I want to wind down the clock speed on the Padauk PFS154 and see how low it can go.
Also I will be using the 5050 Leds that I've used before to minimise the energy requirements.
The super-capacitor used in the last video was a "paltry" 4 Farads. The current version is 2x30 Farad capacitors, and I have some bigger ones coming - er, because see 2nd quote from Edison above!
The code side was where the big gains have been made - I was able to successfully wind down the clock to around 17000Hz (!) and still run the "candle".
/* Candle with Three PWM Pseudo-random flickering to simulate a candle. Output is via 3xPWM channels, variables can be changed to alter the simulation Wed 12 Oct 2022 20:46:06 AEDT */ #include <stdint.h> #include <stdlib.h> #include "../device.h" #include "../easy-pdk/calibrate.h" #include "../auto_sysclock.h" #include "../delay.h" #include <stdbool.h> #define LED4_BIT 4 #define LED0_BIT 0 #define LED3_BIT 3 uint16_t myrand = 2901; // happy birthday // global variables randomised later for flickering, using the // "waveslow" and "wavefast" arrays uint8_t slowcounter = 0; uint8_t medcounter = 0; uint8_t fastcounter = 0; uint8_t slowstart = 0; uint8_t slowend = 0; uint8_t medstart = 0; uint8_t medend = 0; uint8_t faststart = 0; uint8_t fastend = 0; uint8_t faster = 0; uint8_t waveslow[] = {50, 100, 170, 200}; // 1 leds on PA4 uint8_t wavemed[] = {40, 120, 140, 220}; // 1 led on PA3 uint8_t wavefast[] = {40, 80, 150, 240}; // 1 led on PA0 // booleans to keep track of "fading up" or "fading down" // in each of the slow and fast cycles bool fastup = true; bool slowup = true; bool medup = true; void mydelay(uint8_t counter) { for (uint8_t thiscount = 0; thiscount <= counter; thiscount++) { _delay_us(1); } } uint16_t gimmerand(uint16_t small, uint16_t big) { myrand ^= (myrand << 13); myrand ^= (myrand >> 9); myrand ^= (myrand << 7); return abs(myrand) % 23 * (big - small) / 23 + small; } void getnewslow() { slowstart = gimmerand(waveslow[0], waveslow[1]); slowend = gimmerand(waveslow[2], waveslow[3]); } void getnewmed() { medstart = gimmerand(wavemed[0], wavemed[1]); medend = gimmerand(wavemed[2], wavemed[3]); } // initialise a new fast cycle including the new speed of cycle void getnewfast() { faststart = gimmerand(wavefast[0], wavefast[1]); fastend = gimmerand(wavefast[2], wavefast[3]); faster = gimmerand(1, 8); } // Main program void main() { // Initialize hardware // Set LED as output (all pins are input by default) PAC |= (1 << LED4_BIT) | (1 << LED0_BIT) | (1 << LED3_BIT); PWMG1DTL = 0x00; // Clear the LED PWM duty value PWMG1DTH = 0x00; PWMG1CUBL = 0xff; // set PWM counter upper bound to 0xffff PWMG1CUBH = 0xff; PWMG1C = 0x87; PWMG1S = 0b00000000; // prescaler=4, divider=1, no interrupt PWMG0DTL = 0x00; // Clear the LED PWM duty value PWMG0DTH = 0x00; PWMG0CUBL = 0xff; // set PWM counter upper bound to 0xffff PWMG0CUBH = 0xff; // PWMG0C = (uint8_t)(PWMG0C_ENABLE | PWMG0C_INVERT_OUT | PWMG0C_OUT_PA0 | PWMG0C_CLK_IHRC); PWMG0C = 0x87; PWMG0S = 0b00000000; // prescaler=4, divider=1, no interrupt PWMG2DTL = 0x00; // Clear the LED PWM duty value PWMG2DTH = 0x00; PWMG2CUBL = 0xff; // set PWM counter upper bound to 0xffff PWMG2CUBH = 0xff; PWMG2C = 0x87; PWMG2S = 0b00000000; // prescaler=4, divider=1, no interrupt getnewfast(); getnewslow(); getnewmed(); slowcounter = slowstart; fastcounter = faststart; medcounter = medstart; // Main processing loop while (1) { // ramp up slow if (slowup) { slowcounter++; if (slowcounter > slowend) { // ramp finished so switch boolean slowup = !slowup; } } else { // ramp down slow slowcounter--; if (slowcounter < slowstart) { // ramp finished so switch boolean slowup = !slowup; getnewslow(); } } // ramp up med if (medup) { medcounter++; if (medcounter > medend) { // ramp finished so switch boolean medup = !medup; } } else { // ramp down med medcounter--; if (medcounter < medstart) { // ramp finished so switch boolean medup = !medup; getnewmed(); } } // ramp up fast if (fastup) { fastcounter = fastcounter + faster; if (fastcounter > fastend) { // ramp finished so switch boolean fastup = !fastup; } } else { // ramp down fast fastcounter = fastcounter - faster; if (fastcounter < faststart) { // ramp finished so switch boolean fastup = !fastup; getnewfast(); } } // delay + a re-purposed random for ramp speeds mydelay(3+faster); PWMG1DTL = slowcounter & 255; PWMG1DTH = slowcounter; PWMG0DTL = fastcounter & 255; PWMG0DTH = fastcounter; PWMG2DTL = medcounter & 255; PWMG2DTH = medcounter; } } // Startup code - Setup/calibrate system clock unsigned char _sdcc_external_startup(void) { // Initialize the system clock (CLKMD register) with the IHRC, ILRC, or EOSC clock source and correct divider. // The AUTO_INIT_SYSCLOCK() macro uses F_CPU (defined in the Makefile) to choose the IHRC or ILRC clock source and divider. // Alternatively, replace this with the more specific PDK_SET_SYSCLOCK(...) macro from pdk/sysclock.h PDK_SET_SYSCLOCK(SYSCLOCK_ILRC_DIV4); // Insert placeholder code to tell EasyPdkProg to calibrate the IHRC or ILRC internal oscillator. // The AUTO_CALIBRATE_SYSCLOCK(...) macro uses F_CPU (defined in the Makefile) to choose the IHRC or ILRC oscillator. // Alternatively, replace this with the more specific EASY_PDK_CALIBRATE_IHRC(...) or EASY_PDK_CALIBRATE_ILRC(...) macro from easy-pdk/calibrate.h EASY_PDK_CALIBRATE_ILRC(17000,3000); return 0; // Return 0 to inform SDCC to continue with normal initialization. }
Compiling was fine and oh so nice to have 2k available instead of the 1k ATTiny13 (although I am still keen to learn Padauk assembler and make this a bit smaller).
$> make program
sdcc -mpdk14 -c --std-sdcc11 --opt-code-size -DPFS154 -DF_CPU=1000000 -DTARGET_VDD_MV=3000 -I. -I../include -o .build/main.rel main.c sdcc -mpdk14 --out-fmt-ihx -o .output/FadeLED_PFS154.ihx .build/main.rel .build/lib.lib makebin -p .output/FadeLED_PFS154.ihx .output/FadeLED_PFS154.bin ---------- Segments ---------- . .ABS. 00000000 00000000 = 0. bytes (ABS,CON) . .ABS. 00000000 00000000 = 0. bytes (ABS,CON) HEADER1 00000000 00000002 = 2. bytes (ABS,CON) HEADER3 00000000 00000010 = 16. bytes (ABS,CON) PREG2 00000000 00000002 = 2. bytes (ABS,CON) RSEG0 00000000 00000002 = 2. bytes (ABS,CON) DATA 00000002 00000047 = 71. bytes (REL,CON) HOME 00000022 00000002 = 2. bytes (REL,CON) GSINIT 00000024 0000006C = 108. bytes (REL,CON) SSEG 0000004C 00000001 = 1. bytes (REL,CON) GSFINAL 00000090 00000002 = 2. bytes (REL,CON) CODE 00000092 000003E6 = 998. bytes (REL,CON) ------------------------------ Size of FadeLED_PFS154.bin: 1144 bytes easypdkprog -i noblankchk -n PFS154 write .output/FadeLED_PFS154.ihx Erasing IC... done. Writing IC (572 words)... done. Calibrating IC * ILRC SYSCLK=17000Hz @ 3.00V ... calibration result: 16436Hz (0xF0) done.
Left to do? Basically I want to keep on "Edisoning" this thing as follows:
a) Change the code to wind back the power of the ramping (e.g. instead of changing PWM from 40 to 220, try 30 to 160 or similar)
b) Upscale the super-caps. At the moment I'm getting around 4 hours of light - I think 6-8 hours is a reasonable goal.
c) Change some or all of the code from C to Assembler. This could be very scary given that assembler programming (which I love) is a pretty good path to madness.
d) Any suggestions??
Here's the video - enjoy!